

大家好!在安防监控、物联网设备、消费电子等领域,瑞芯微(Rockchip)平台凭借出色的图像处理能力,成为很多开发者的首选。但Camera开发涉及硬件链路、驱动配置、调试优化等多个环节,新手很容易踩坑。今天这篇文章,我们就基于瑞芯微官方《RK VI驱动指南》,梳理RK平台Camera开发的核心基础知识点和实战调试方法,帮你快速入门,解决常见问题。
一、RK Camera开发基础知识点
想要做好RK平台Camera开发,首先要理清“硬件架构-软件配置-关键概念”这三大块,我们一步步拆解。
1.先搞懂:适用平台与核心硬件模块
RK平台对Camera的支持覆盖多系列芯片,不同芯片的VI(Video Input)模块能力有差异,先明确你的开发目标平台:
| 芯片型号
|
软件系统
|
核心能力亮点
|
| RV1126
|
Linux 4.19
|
支持3帧HDR,VICAP Full/Lite双IP
|
| RV1109
|
Linux 4.19
|
同RV1126,分辨率上限3072x2048
|
| RK3566
|
Linux 4.19
|
单VICAP,不支持HDR
|
| RK3568
|
Linux 4.19
|
支持2帧HDR,分辨率上限4096x2304
|
| RK3588
|
Linux 5.10
|
双ISP +双FEC,支持8K合成+ 7路sensor
|
核心硬件模块解析
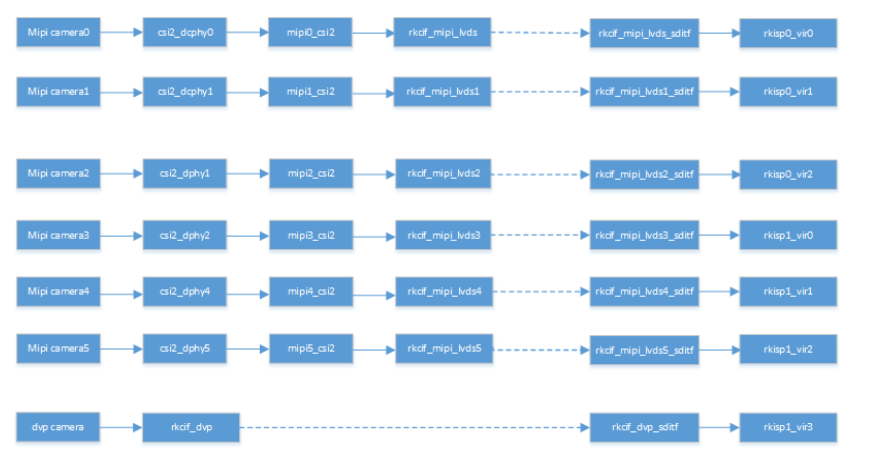
Camera数据从传感器到输出,要经过“采集-处理-后处理”三大模块,链路如下(建议收藏):
•RKVICAP:视频采集模块,负责接收Sensor的原始数据,支持MIPI(DPHY/CPHY)、LVDS、DVP(BT601/BT656/BT1120)接口,不同芯片的VICAP数量/能力不同(如RV1126有VICAP Full+Lite)。
•RKISP:图像信号处理器,Camera的“大脑”,支持HDR合成(2帧/ 3帧)、自动白平衡(AWB)、自动曝光(AE)、自动对焦(AF)等3A功能,还能处理RAW格式转换。
•CIS(CMOS Image Sensor):相机传感器,通过I2C与主控通信,驱动需基于V4L2 Subdev框架实现,是数据的“源头”。
2.再上手:关键软件配置
软件配置的核心是DTS设备注册和驱动框架,这两步错了,Camera根本跑不起来。
(1)DTS配置:Camera注册的“身份证”
DTS(设备树)负责描述硬件连接关系,比如Sensor的接口类型、I2C地址、电源GPIO等,不同接口(MIPI/LVDS/DVP)的配置略有差异,这里以最常用的MIPI接口为例(基于RV1126+OS04A10 Sensor):
// 1. Sensor节点配置os04a10:os04a10@36{compatible ="ovti,os04a10";// 与驱动匹配的字符串reg = <0x36>;// Sensor I2C地址(7位)clocks = <&cru CLK_MIPICSI_OUT>;// Sensor时钟源clock-names ="xvclk";power-domains = <&power RV1126_PD_VI>;// 电源域// 电源配置avdd-supply = <&vcc_avdd>;dovdd-supply = <&vcc_dovdd>;dvdd-supply = <&vcc_dvdd>;// GPIO配置(断电/复位)pwdn-gpios = <&gpio1 RK_PD4 GPIO_ACTIVE_HIGH>;// 模组信息(匹配IQ参数)rockchip,camera-module-index = <1>;// 模组编号(不重复)rockchip,camera-module-facing ="front";// 朝向(front/back)// MIPI端口链接port {ucam_out0: endpoint {remote-endpoint = <&mipi_in_ucam0>;// 链接到MIPI DPHYdata-lanes = <1234>;// MIPI Lane数(必须配置,否则识别失败)};};};// 2. MIPI DPHY节点配置&csi_dphy0 {status ="okay";ports {port@0{mipi_in_ucam0:endpoint@1{reg = <1>;remote-endpoint = <&ucam_out0>;// 反向链接Sensordata-lanes = <1234>;// 与Sensor一致};};port@1{csidphy0_out:endpoint@0{remote-endpoint = <&isp_in>;// 链接到ISP};};};};// 3. ISP虚拟节点配置(数据链路生效)&rkisp_vir0 {status ="okay";ports {port@0{isp_in:endpoint@0{remote-endpoint = <&csidphy0_out>;// 反向链接MIPI DPHY};};};};
关键注意点:
•compatible必须与Sensor驱动中的of_match_table一致,否则驱动无法匹配设备;
•data-lanes必须明确(如4 Lane填<1 2 3 4>),MIPI接口不配置会识别为其他类型;
•多Sensor注册时,需分配不同的camera-module-index,避免冲突(如RK3588支持7路Sensor:6路MIPI+1路DVP)。
(2)驱动框架:基于I2C+V4L2 Subdev
RK平台Camera驱动遵循Linux标准框架,核心是CIS驱动(Sensor驱动),基于I2C总线(Sensor与主控通信)和V4L2 Subdev(与上层框架交互),关键组成如下:
| 核心组件
|
作用
|
| struct i2c_driver
|
I2C驱动结构体,定义probe(设备匹配)、remove(设备卸载)、匹配表等
|
| struct v4l2_subdev_ops
|
V4L2子设备操作集,包含core(电源/ IOCTL)、video(流控制)、pad(格式)
|
| 关键API
|
set_fmt(设输出格式)、get_fmt(获格式)、s_stream(启停流)等
|
比如i2c_driver的示例代码(简化):
staticconststructof_device_id os04a10_of_match[] = {{ .compatible ="ovti,os04a10"},// 与DTS匹配{},};staticstructi2c_driver os04a10_i2c_driver = {.driver = {.name ="os04a10",.of_match_table = os04a10_of_match,},.probe = os04a10_probe,// 设备匹配成功后执行.remove= os04a10_remove,};module_i2c_driver(os04a10_i2c_driver);
3.必掌握:核心技术概念
搞懂这些概念,才能应对复杂场景(如HDR、多摄):
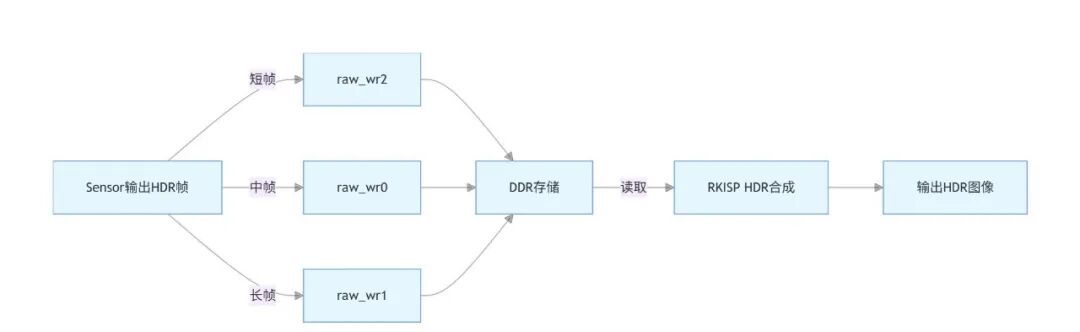
(1)HDR模式:高动态范围成像
RKISP支持2帧(RK3568)或3帧(RV1126/RK3588)HDR合成,原理是采集不同曝光时间的帧(短帧-欠曝、中帧-正常、长帧-过曝),通过ISP合成高动态范围图像,数据链路如下:
(2)RAW存储格式:紧凑vs非紧凑
RAW是Sensor输出的原始数据,存储格式影响内存占用和处理效率:
•非紧凑型:10bit/12bit数据按16bit存储(高位对齐),内存占用高,但处理简单,适用于VICAP采集(如RV1126 DVP仅支持非紧凑);
•紧凑型:12bit数据按8bit紧凑存储(4字节存3个像素),内存占用低,适用于ISP直接处理。
(3)多摄同步(RK3588专属)
RK3588支持多摄同步,解决多Sensor数据时序不一致问题,主要有两种模式:
•Master-Slave:从设备等待主设备的同步信号,仅收到信号才输出数据;
•Master-Master:主设备发送同步信号,从设备独立输出,收到信号后同步(支持当前帧完成后同步或立即同步)。
核心知识点脑图
为了方便记忆,整理成脑图如下:
二、RK Camera实战调试方法
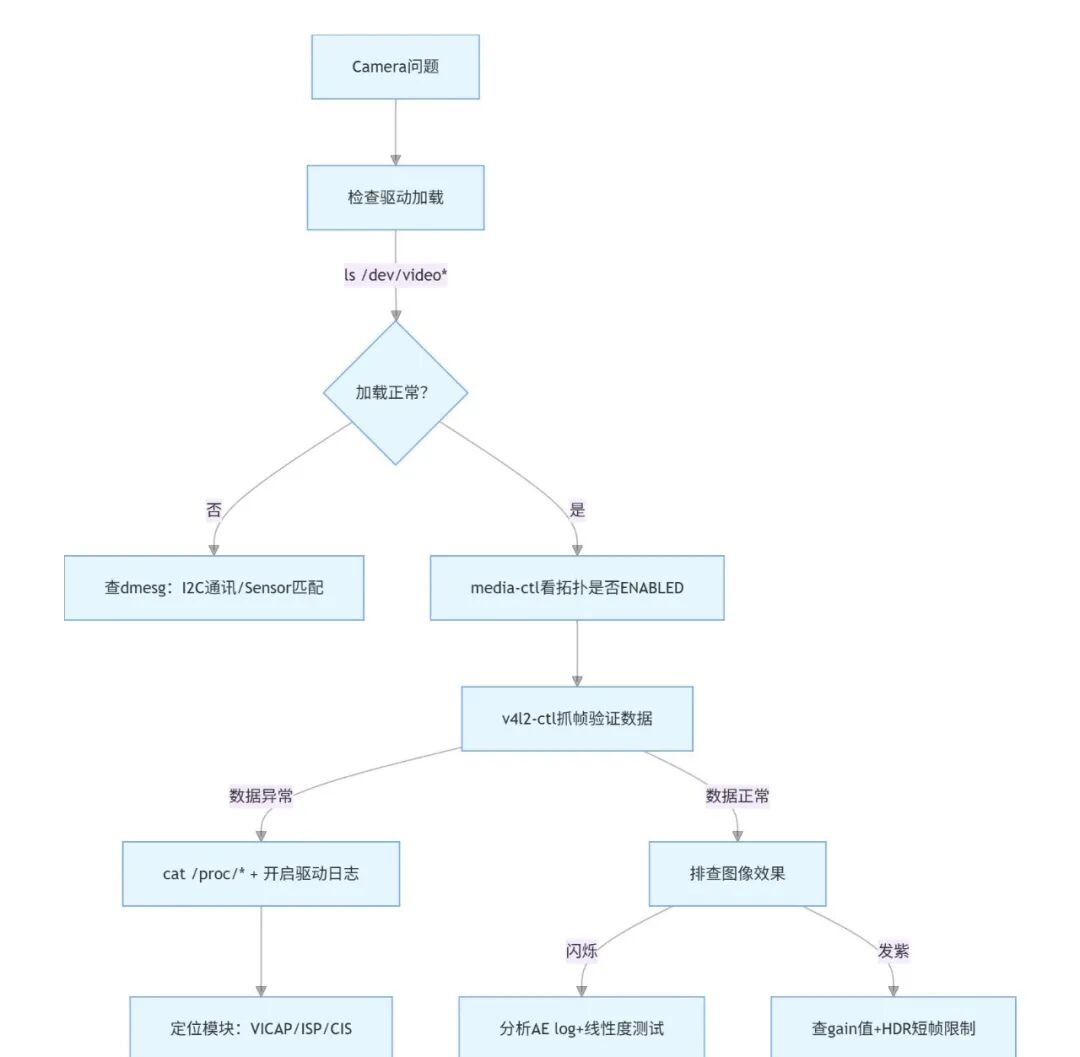
开发中遇到“Camera不识别”“预览闪烁”“图像发紫”等问题,掌握以下调试方法,能快速定位问题。
1.必备工具:media-ctl + v4l2-ctl
这两个工具是RK Camera调试的“左右手”,前者管理媒体拓扑,后者操作视频设备。
(1)media-ctl:查看/配置拓扑
# 1. 查看media设备拓扑(X为0/1/2,需枚举)media-ctl -p -d /dev/mediaX# 示例输出:会显示Sensor→MIPI→ISP的链路,确认是否“ENABLED”# 2. 设置Sensor输出格式(如OS04A10设2688x1520,RAW12)media-ctl -d /dev/media0--set-v4l2'"os04a10 1-0036":0[fmt:SBGGR12_1X12/2688x1520]'# 3. 切换ISP数据链路(如从ISPP切到MainPath抓RAW)media-ctl -l'"rkisp-isp-subdev":2->"rkisp_mainpath":0[1]'
(2)v4l2-ctl:抓帧/设控制参数
# 1. 抓RAW图(设分辨率、格式,保存到/tmp)v4l2-ctl -d /dev/video0--set-fmt-video=width=2688,height=1520,pixelformat=RG10--stream-mmap=4 # 4个MMAP缓存--stream-count=1 # 抓1帧--stream-to=/tmp/cap.raw # 保存路径--stream-skip=2# 跳过前2帧(避免初始帧异常)# 2. 设置曝光和增益(需先找到Sensor的subdev节点,如/dev/v4l-subdev4)v4l2-ctl -d /dev/v4l-subdev4--set-ctrl'exposure=1216,analogue_gain=10'# 3. 查看支持的控制参数v4l2-ctl -d /dev/v4l-subdev4 --list-ctrls
2. Debug信息:定位问题的“线索”
遇到问题先看日志,RK提供了多个Debug入口:
(1)查看proc文件
proc文件包含ISP/VICAP的实时状态,比如:
# 查看ISP状态(帧号、格式、模块开关)cat/proc/rkisp0# 查看VICAP状态(输入格式、帧率、中断统计)cat/proc/rkcif_mipi_lvds
示例输出关键信息:
•Input Format:SGBRG10_1X10 Size:2688x1520@30fps:输入格式和帧率;
•ErrCnt:0:无错误中断,若不为0,可能是MIPI链路异常;
•HDRTMO ON:HDR TMO模块已开启。
(2)寄存器Dump
若怀疑硬件配置问题,可Dump ISP/VICAP寄存器:
# RV1126 Dump ISP寄存器(地址0xffb50000,长度0x10000)io-4-l0x100000xffb50000 > /tmp/isp.reg# RK3568 Dump ISP寄存器io-4-l0x100000xfdff0000 > /tmp/isp.reg
(3)开启驱动日志
# 开启ISP驱动日志(n=0~3,3级最详细)echo3 > /sys/module/video_rkisp/parameters/debug# 开启ISPP驱动日志echo3 > /sys/module/video_rkispp/parameters/debug# 查看日志dmesg | grep -i"rkisp"
3.常见问题排查:实战案例
(1)问题1:预览闪烁
排查步骤:
1.开启AE日志:AE(自动曝光)异常是闪烁的常见原因,开启日志查看统计值:
exportpersist_camera_engine_log=0x1ff3# 开启AE logrkisp_demo# 运行测试程序
1.分析日志:
◦若TmoMeanLuma(TMO合成后亮度)跳变,是TMO参数不匹配,需调整IQ参数;
◦若MeanLuma稳定但画面闪烁,是ISP后处理模块问题,需联系瑞芯微工程师;
◦若time(曝光时间)和gain(增益)同时变化,检查生效帧配置(如sensor的time通常n+2帧生效,需在IQ文件中设置time_delay=2)。
1.测试线性度:若gain线性度差,会导致亮度跳变,测试方法:
◦盖毛玻璃(均匀入光),固定gain=1,抓10ms/20ms/30ms的RAW图;
◦统计亮度值,减去黑电平(镜头遮黑抓图),若亮度与曝光时间成直线,线性度正常。
(2)问题2:光源处紫色溢出
排查步骤:
1.线性模式:检查gain值是否超Sensor手册限制(如驱动换算的gain寄存器值是否合法);
2.HDR模式:
◦查看内核日志是否有MIPI报错(dmesg | grep -i "mipi err"),若有是短帧偏移导致合成错位;
◦确认短帧曝光是否超限制(如某sensor短帧最大2ms,若IQ配置3ms,实际仅2ms生效,导致合成ratio异常)。
调试流程图
4.实用技巧
•单独更新驱动:无需重新编译内核,生成补丁后应用:
# 生成补丁(A=老版本commit,B=新版本commit)git format-patch A..B drivers/media/... -o tmp_patch# 应用补丁git am tmp_patch/*
•查看驱动版本:
cat/sys/module/video_rkisp/parameters/version
•判断ISP加载状态:
# 查看video节点名称,确认RKISP节点grep''/sys/class/video4linux/video*/name# 查看拓扑是否正常media-ctl -p -d /dev/mediaX
三、总结与资源推荐
开发要点总结
1.硬件层面:明确芯片的VI模块能力(如RK3588的多摄同步),理清Sensor→VICAP→ISP的数据链路;
2.软件层面:DTS配置要注意compatible、data-lanes等关键参数,驱动遵循I2C+V4L2 Subdev框架;
3.调试层面:先用media-ctl/v4l2-ctl验证链路,再通过proc日志和寄存器定位问题,常见问题优先查AE日志和参数限制。
参考资源
•官方文档:《Rockchip_Driver_Guide_VI_CN》(本文基于v1.1.1版本);
希望这篇文章能帮你快速上手RK平台Camera开发!如果有其他问题,欢迎在评论区交流~







